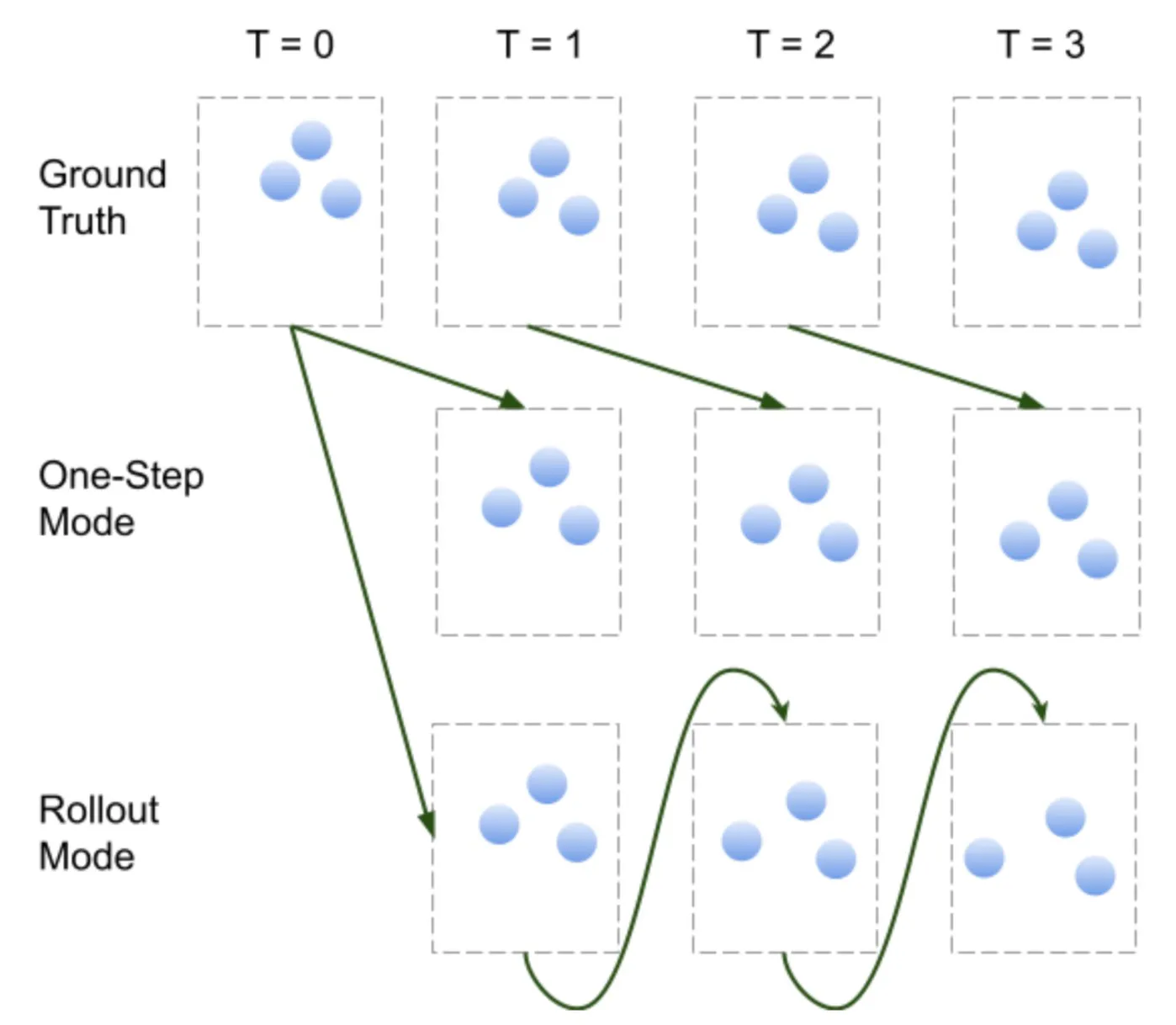
Operation Modes of GNS
The GNS works in two modes: one-step mode and rollout mode. In one-step mode, the GNS always makes predictions with ground-truth inputs. In rollout mode, the GNS predicts positions of particles in the next step based on its own predictions in the previous step. As a result, errors accumulate over time for rollout mode.
One Step Dataset
Each datapoint in this dataset contains trajectories sliced to short time windows. We will use this dataset in the training phase because the history of particles' states are necessary for the model to make predictions. But in the meantime, since long-horizon prediction is usually inaccurate and time-consuming, we sliced the trajectories to short time windows to improve the perfomance of the model.
Rollout Dataset
Each datapoint in this dataset contains trajectories of particles over 1000 time frames. This dataset is used in the evaluation phase to measure the model's ability to makie long-horizon predictions.
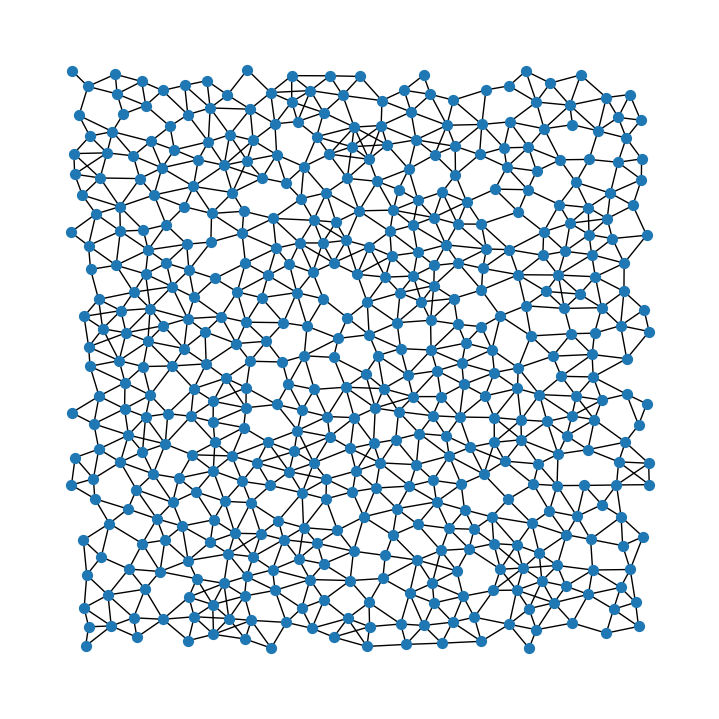
Visualize a graph in the dataset
Each data point in the dataset is a pyg.data.Data object which describes a graph. We explain the contents of the first data point, and visualize the graph.
CVW material development is supported by NSF OAC awards 1854828, 2321040, 2323116 (UT Austin) and 2005506 (Indiana University)